


Tin tức
Bạn cần bao nhiêu không gian cho Robot 6 trục?
Nếu bạn là một nhà sản xuất tự động hóa và có ý định sử dụng cánh tay robot 6 trục, chẳng hạn như Mecademia, Meca500 được sử dụng trong hướng dẫn này làm ví dụ. Bạn có thể quan tâm nhất đến việc định vị và định hướng công cụ Robot (đầu cuối) ở nhiều vị trí khác nhau.
Nếu bạn là một nhà sản xuất tự động hóa và có ý định sử dụng cánh tay robot 6 trục, chẳng hạn như Mecademia, Meca500 được sử dụng trong hướng dẫn này làm ví dụ. Bạn có thể quan tâm nhất đến việc định vị và định hướng công cụ Robot (đầu cuối) ở nhiều vị trí khác nhau.
Do đó, nếu bạn chắc chắn muốn biết tập hợp các vị trí mà bạn có thể tiếp cận với một bộ phận đầu cuối cụ thể được gắn trên một cánh tay robot 6 trục cụ thể. Bạn có thể yêu cầu một số loại sơ đồ hiển thị khu vực làm việc, khối lượng làm việc, phạm vi làm việc của các robot.
Và thật không may, bạn sẽ thường được trình bày với một sơ đồ đơn giản giống như sơ đồ được hiển thị ở dưới đây, hoặc tệ hơn nữa là cái gọi là “tầm với của robot”.
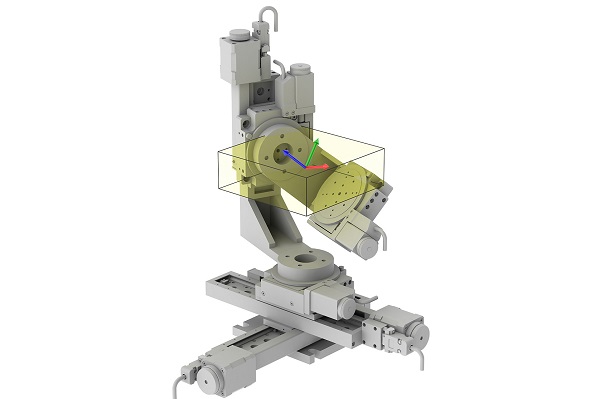
Trong robotics, thuật ngữ thích hợp cho những gì bạn đang tìm kiếm là “không gian làm việc”. Tầm với không có gì ngoài khoảng cách tối đa giữa trung tâm cổ tay của robot (điểm giao nhau giữa các trục của 3 khớp cuối cùng của robot) và trục của khớp thứ nhất. Vùng có màu xám trong hình trên đây là vùng có thể đạt được của cổ tay trung tâm, cho một vòng quay nhất định của khớp thứ nhất. Khu vực này, hoặc thậm chí khả năng bị quét bằng cách xoay khu vực này về trục của khớp thứ nhất, không phải là không gian làm việc của robot... Hoàn toàn không có gì đảm bảo rằng bạn có thể đạt được một vị trí trong tập này chứ đừng nói đến việc đạt đến vị trí đó với bất kỳ định hướng nào. Trên thực tế, nếu bạn gắn một bộ kết thúc tương đối dài, bạn sẽ không chạm tới bất kỳ vị trí nào bằng đầu công cụ của bạn. Không gian làm việc của robot 6 trục là tập hợp tất cả các tư thế (bao gồm vị trí và hướng) có thể đạt được bởi một bộ phận đầu cuối cụ thể được gắn trên robot đó. Do đó, (1) không ai có thể cho bạn biết không gian làm việc của cánh tay robot 6 trục cụ thể là gì, trừ khi bạn chỉ định phần đầu cuối mà bạn định sử dụng là gì và: (2) không gian làm việc đó là một thực thể 6 chiều. Điều đó thường không thể biểu thị bằng đồ họa. “Không gian làm việc của robot 6 trục là tập hợp tất cả các tư thế có thể đạt được bởi một bộ phận đầu cuối cụ thể được gắn trên cánh tay robot đó.” Tất nhiên, có một vài trường hợp ngoại lệ trong lĩnh vực robot, khi nói đến việc thể hiện bằng đồ họa. Không gian làm việc của một robot 6 trục như hình minh họa bên dưới . Robot 6 trục này có thể định vị công cụ của nó ở bất cứ đâu trong khối lập phương màu vàng, theo bất kỳ hướng nào của công cụ. khong gian lam viec cua robot 6 truc Hình ảnh phía trên là robot Cartesian. Nhưng phần lớn các robot công nghiệp 6 trục không phải là loại này. Cánh tay robot 6 trục điển hình, thường được gọi một cách kỳ lạ là một robot có khớp nối theo chiều dọc, bao gồm 7 liên kết được kết nối thành chuỗi thông qua 6 khớp xoay tròn. Đầu tiên phải kể đến chân Robot(base), và cuối cùng là mặt bích Robot (còn gọi là giao diện cơ học).
Và thật không may, bạn sẽ thường được trình bày với một sơ đồ đơn giản giống như sơ đồ được hiển thị ở dưới đây, hoặc tệ hơn nữa là cái gọi là “tầm với của robot”.
Trong robotics, thuật ngữ thích hợp cho những gì bạn đang tìm kiếm là “không gian làm việc”. Tầm với không có gì ngoài khoảng cách tối đa giữa trung tâm cổ tay của robot (điểm giao nhau giữa các trục của 3 khớp cuối cùng của robot) và trục của khớp thứ nhất. Vùng có màu xám trong hình trên đây là vùng có thể đạt được của cổ tay trung tâm, cho một vòng quay nhất định của khớp thứ nhất. Khu vực này, hoặc thậm chí khả năng bị quét bằng cách xoay khu vực này về trục của khớp thứ nhất, không phải là không gian làm việc của robot... Hoàn toàn không có gì đảm bảo rằng bạn có thể đạt được một vị trí trong tập này chứ đừng nói đến việc đạt đến vị trí đó với bất kỳ định hướng nào. Trên thực tế, nếu bạn gắn một bộ kết thúc tương đối dài, bạn sẽ không chạm tới bất kỳ vị trí nào bằng đầu công cụ của bạn. Không gian làm việc của robot 6 trục là tập hợp tất cả các tư thế (bao gồm vị trí và hướng) có thể đạt được bởi một bộ phận đầu cuối cụ thể được gắn trên robot đó. Do đó, (1) không ai có thể cho bạn biết không gian làm việc của cánh tay robot 6 trục cụ thể là gì, trừ khi bạn chỉ định phần đầu cuối mà bạn định sử dụng là gì và: (2) không gian làm việc đó là một thực thể 6 chiều. Điều đó thường không thể biểu thị bằng đồ họa. “Không gian làm việc của robot 6 trục là tập hợp tất cả các tư thế có thể đạt được bởi một bộ phận đầu cuối cụ thể được gắn trên cánh tay robot đó.” Tất nhiên, có một vài trường hợp ngoại lệ trong lĩnh vực robot, khi nói đến việc thể hiện bằng đồ họa. Không gian làm việc của một robot 6 trục như hình minh họa bên dưới . Robot 6 trục này có thể định vị công cụ của nó ở bất cứ đâu trong khối lập phương màu vàng, theo bất kỳ hướng nào của công cụ. khong gian lam viec cua robot 6 truc Hình ảnh phía trên là robot Cartesian. Nhưng phần lớn các robot công nghiệp 6 trục không phải là loại này. Cánh tay robot 6 trục điển hình, thường được gọi một cách kỳ lạ là một robot có khớp nối theo chiều dọc, bao gồm 7 liên kết được kết nối thành chuỗi thông qua 6 khớp xoay tròn. Đầu tiên phải kể đến chân Robot(base), và cuối cùng là mặt bích Robot (còn gọi là giao diện cơ học).











